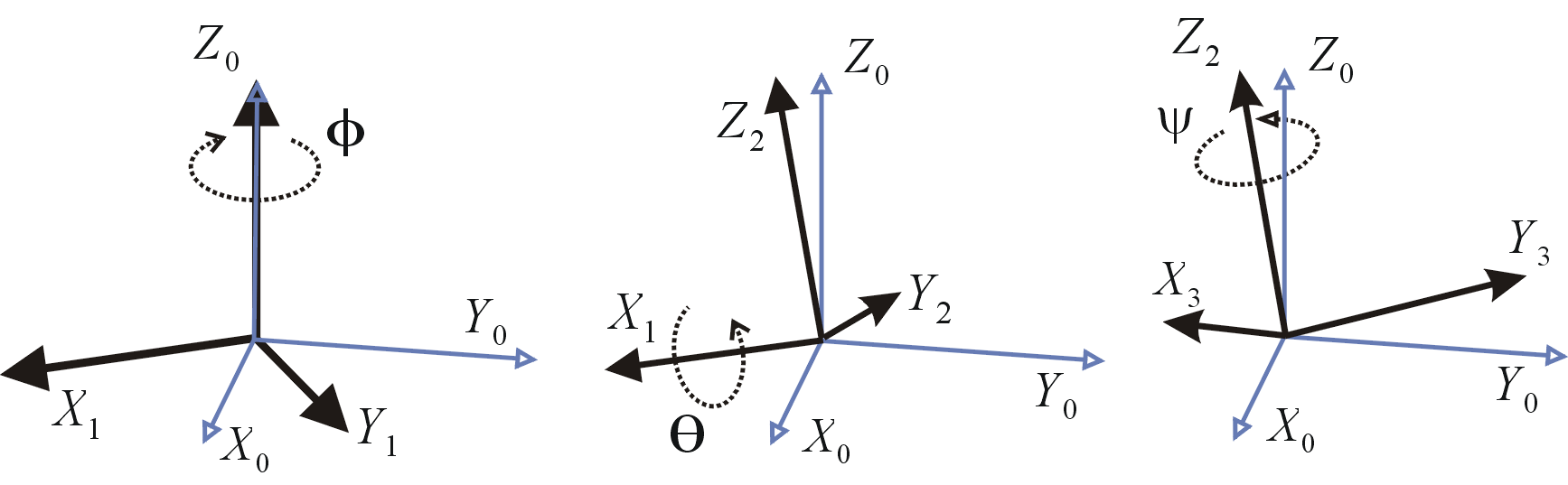
Rotation representation: Euler angles
- Three consecutive rotations along \((x,y,z)\) coordinates.
- Can use basic rotation matrices
- \(R_x=\left(\begin{array}{ccc}1 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) \\ 0 & -\sin \theta) & \cos(\theta)\end{array}\right)\) \(R_y= \left( \begin{array}{ccc} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta) \end{array} \right) \) \(R_z= \left( \begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\-\sin(\theta) & \cos(\theta) & 0 \\0 & 0 & 1 \end{array} \right) \)
- Multiple Euler angles conventions
-
- - Proper Euler : z-x-z', x-y-x', y-z-y', ...
- - Trait-Bryan : x-y-z (global), ...
- Pro
-
- - Combination of rotation around known axis
- - Comprehensive parameters (3 dof)
- - Animators can interact with angular curves
- - Easy conversion to matrix
- - Widely used in robotics
89/113